
Abstract
Solitary wave solutions are of great interest to bio-mathematicians and other scientists because they provide a basic description of nonlinear phenomena with many practical applications. They provide a strong foundation for the development of novel biological and medical models and therapies because of their remarkable behavior and persistence. They have the potential to improve our comprehension of intricate biological systems and help us create novel therapeutic approaches, which is something that researchers are actively investigating. In this study, solitary wave solutions of the nonlinear Murray equation will be discovered using a modified extended direct algebraic method. These solutions represent a uniform variation in blood vessel shape and diameter that can be used to stimulate blood flow in patients with cardiovascular disease. These solutions are newly in the literature, and give researchers an important tool for grasping complex biological systems. To see how the solitary wave solutions behave, graphs are displayed using Matlab.
Similar content being viewed by others
Introduction
Nonlinear partial differential equations are mathematical models used to describe nonlinear biological phenomena that involve several variables and interactions. Some examples of nonlinear biological phenomena that can be modeled using nonlinear partial differential equations include, reaction-diffusion systems, tumor growth and population dynamics. In addition to reaction-diffusion systems are nonlinear partial differential equations that describe the spread of chemical reactions through a medium. They are used to simulate how patterns formation in biological systems, such as the growth of bacterial colonies, the growth of animal coats, and the propagation of waves. The dispersion of electrical signals in neurons or the propagation of sound waves in the inner ear are examples of wave propagation in biological systems that can be described using nonlinear partial differential equations. The formation and spread of tumors in the body can be modeled using tumor growth nonlinear partial differential equations, which incorporate factors like nutrition availability, cell division rates, and interactions with the surrounding tissue. A population dynamics nonlinear partial differential equations can be used to simulate the dynamics of biological populations by considering factors like competition, predation, and environmental influences.
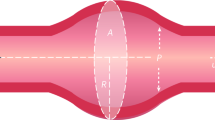
The Murray equation is a mathematical equation that explains the optimal size and branching angles of blood vessels in biological organisms. It simply says that the cube of a blood vessel diameter is proportional to the flow rate through it. But occasionally, the rate of blood flow through a blood vessel deviates from this straightforward relationship, necessitating the use of a more complicated variant of the Murray equation, known as the nonlinear Murray equation. The nonlinear Murray equation takes into consideration factors like the non-Newtonian behavior of blood flow and the elasticity of blood vessel walls.
Depending on the particular parameters and assumptions employed in the model, the nonlinear Murray equation precise form may change. A power law link between flow rate and vessel diameter is included in some versions of the equation, while more complex functional forms are used in others. Usually, sophisticated mathematical methods are needed to solve the nonlinear Murray equation. In the field of bio mechanics, research is now being done on the nonlinear Murray equation and its nonlinear extensions. The study of the Murray equation and its nonlinear extensions is an active area of research in the field of bio mechanics. The development of new treatments for cardiovascular disorders and other problems that affect the body blood flow can be greatly influenced by understanding the principles underlying the formation and function of blood vessels9.
In some research, the nonlinear Murray equation simplified forms have been derived exact solutions or analytical approximations. For instance, based on assumptions about the geometry and flow characteristics of the system, West et al.4 developed an analytical approximation for the optimal branching angle of blood vessels in a simplified form of the Murray equation. The Murray equation8, which represents blood flow in a single vessel, has a one-dimensional form that Olufsen et al.5 derived an exact solutions. This solution allowed for the examination of the effects of various physical conditions on blood flow in the vessel and was based on a linearization of the nonlinear Murray equation. More recently, a number of studies have examined the behavior of the nonlinear Murray equation under various circumstances using numerical simulation and other computational methods. For instance, Zhang et al.6 study used a finite element method7 to examine the effects of various physical parameters on the structure and function of a complex network of blood vessels.
A theory that explains the connection between the diameter of blood vessels and the rate of blood flow through them is known as Murray’s law or principle. This theory, which takes into account the impact of fluid dynamics, geometry, and other factors on the blood flow, is mathematically expressed by the non-linear Murray equation.
where: R is the radius of the blood vessel, Q is the blood flow rate through the vessel, w is the blood viscosity, L is the length of the vessel, C and D are constants. We take into account the nonlinear reaction-diffusion equation with convection term, which has the following form1,2,3
where \(u\left( x,t \right)\) is an unknown function, A(u) , B(u) and C(u) are arbitrary smooth functions. When \(A(u) = 1\), \(B(u) = \alpha _{1} u\) and \(C(u) = \alpha _{2} u - \alpha _{3} u^{2}\) where \(\alpha _{1}, \alpha _{2}\) and \(\alpha _{3} \in \mathbb {R}\), then Eq. (2) becomes
which is advanced form of the nonlinear Murray equation.
Algorithm for modified extended direct algebraic method
In this section, we introduce the algorithm of modified extended direct algebraic method9,10,11,12,13,14,15,16 which is also known as the modified extended \(\tanh\)-function method17,18,19,20,21,22,23,
We provide an overview of the key steps involved in this method, which is explained in the following steps:
Suppose we have the following nonlinear PDE
where \(u=u(x,t)\) is an unknown wave function, P is a polynomial in \(u=u(x,t)\) and its various partial derivatives in which the highest order derivatives and nonlinear terms are involved.
Step 1. Using the following wave transformation for traveling wave solutions
where c is the wave speed.
Step 2. Plugging Eq. (5) into Eq. (4) yields a nonlinear ordinary differential equation
Step 3. Let \(U(\xi )\) be the next variable that can be written as a polynomial in \(\delta (\xi )\)
where \(\beta _{0}, \beta _{1}, \beta _{2}, \lambda _{1}, \lambda _{2}\) are unknown constants to be determined later, while \(\delta ^{'}(\xi )\) satisfies the nonlinear ODE
where \(\sigma\) is arbitrary constant, \(\delta '=\delta (\xi )\) and \(\delta '= \frac{d\delta }{d\xi }\).
Step 4. The homogeneous balance between the highest order derivatives and the nonlinear terms found in Eq. (6) can be examined in order to determine the value of the natural number N24,25
Plugging Eq. (7) into Eq. (5) along with Eq. (8) will yield a system of algebraic equations with respect to \(\beta _{i},\lambda _{i}\), and \(\sigma\) where \(i = 1,2,3,\cdots N\). because all the coefficients of \(\delta ^{i}\) have to vanish, we can then find \(\beta _{0}\), \(\beta _{{i}}\), \(\lambda _{{i}}\), \(\sigma\), and c. Eq. (8) has the general solutions:
Family-1. If \(\sigma <0\), we have
it depends on the initial conditions.
Family-2. If \(\sigma >0\), we have
it depends on the initial conditions.
Family-3: If \(\sigma =0\), we have
Application of modified extended tanh-function method
Consider the nonlinear Murray equation
Making wave transformation
Plugging Eq. (13) into Eq. (12), we have
Balancing \(Q''\) with \(Q^2\) in Eq. (14) gives \(N = 2\). So, using Eq. (7) we have
wherein \(\beta _{0},\, \, \beta _{1}\, \beta _{2}\,\) and \(\, \lambda _{1}, \lambda _{2}\) are arbitrary constants. Plugging Eq. (15) along with Eq. (8) into Eq. (14) will provide these constants, as well as collecting all terms with the same power of \(\delta ^{i}, i = 0, 1,\cdots , N\) and setting every coefficient equal to zero, hence the following collection of algebraic equations is obtained
The following set of solutions are possible for solving the 16 using Maple.
Case 1. Let \(\beta _{0}=0,\beta _{1}=0, \lambda _{{1}}=0,\) and \(\beta _{{2}}, \lambda _{{2}},c,\sigma\) are free parameters
Case 2. Let \(\beta _{0}=0,\beta _{1}=0,\beta _{2}=0,\) and \(\lambda _{{1}},\lambda _{{2}},\sigma , c\) are free parameters
Case 3. Let \(\beta _{0} = 0, \beta _{{1}}= 0\), \(\lambda _{{2}}=0,\) and \(\beta _{{2}} ,\lambda _{{1}}, c, \sigma\) are free parameters
Case 4. Let \(\lambda _{1}=0,\beta _{1}=0\) and \(\beta _{{0}}, \beta _{{2}}, \lambda _{{2}}, c, \sigma ,\) are free parameters
Case 5. Let \(\beta _{1}=0,\beta _{2}=0,\lambda _{{1}}=0,\) and \(\beta _{0}, \lambda _{{2}}, c, \sigma\) are free parameters
The following solutions are the families of solitary wave solutions of Eq. 12for different cases17, 18, 19, 20, 21:
Case 1. Plugging Eq. (17) along with Eq. (15) into Eq. (13), then solitary waves solutions of Eq. (12) can be expressed in form of following families:
Family-1. When \(\sigma <0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Family-2. When \(\sigma >0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Family-3. When \(\sigma = 0\), then the possible solutions are solutions
where \(\xi =x-{ ct}\).
Case 2. Plugging Eq. (18) along with Eq. (15) into Eq. (13), then solitary waves solutions of Eq. (12) can be expressed in form of following families:
Family-1. When \(\sigma <0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Family-2. When \(\sigma >0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Case 3. Plugging Eq. (19) along with Eq. (15) into Eq. (13), then solitary waves solutions of Eq. (12) can be expressed in form of following families:
Family-1. When \(\sigma <0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Family-2. When \(\sigma >0\), then the possible solutions are
where \(\xi =x-{ ct}\).
Case 4. Plugging Eq. (20) along with Eq. (15) into Eq. (13), then solitary waves solutions of Eq. (12) can be expressed in form of following families:
Family-1. When \(\sigma <0\), then the possible solutions are
where \(\xi =x-{ \left( -\,{\frac{\alpha _{{1}} \left( 20\,\sigma +\alpha _{{2}} \right) }{2\alpha _{{3}}}}\right) t}\).
Family-2. When \(\sigma >0\), then the possible solutions are
where \(\xi =x-{ \left( -\,{\frac{\alpha _{{1}} \left( 20\,\sigma +\alpha _{{2}} \right) }{2\alpha _{{3}}}}\right) t}\).
Family-3. When \(\sigma =0\), then the possible solutions are
where \(\xi =x-{ \left( -{\frac{\alpha _{{1}} \alpha _{{2}} }{2\alpha _{{3}}}}\right) t}\).
Case 5. Plugging Eq. (21) along with Eq. (15) into Eq. (13), then solitary waves solutions of Eq. (12) can be expressed in form of following families:
Family-1. When \(\sigma <0\), then the possible solutions are
where \(\xi =x-{\left( \dfrac{1}{2}\,{\frac{\alpha _{{1}} \left( \alpha _{{2}}+\sqrt{{\alpha _{{2}}} ^{2}+48\,{\sigma }^{2}} \right) }{\alpha _{{3}}}}\right) t}\).
Family-2. When \(\sigma >0\), then the possible solutions are
where \(\xi =x-{ \left( \dfrac{1}{2}\,{\frac{\alpha _{{1}} \left( \alpha _{{2}}+\sqrt{{\alpha _{{2}}} ^{2}+48\,{\sigma }^{2}} \right) }{\alpha _{{3}}}}\right) t}\).
The graphical representation
This section provides the graphical representations that explain the outcomes of our study, see Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18 and 19.

Take \(\alpha _{1} = 1.7,\alpha _{2} = 1.2, \alpha _{3} = 1.5, c = 0.45,\sigma = - 0.007\) for 3D and contour plots of Eq. (22).

Take \(\alpha _{1} = 5.5,\alpha _{2} = 5.25, \alpha _{3} =20.05, c = 50.75,\sigma = -2.09\) for 3D and contour plots of Eq. (23).

Take \(\alpha _{1} = 2.07,\alpha _{2} = 0.02, \alpha _{3} =0.05, c = 0.004,\sigma = 0.75\) for 3D and contour plots of Eq. (24).

Take \(\alpha _{1} = 15.5,\alpha _{2} = 10.25, \alpha _{3} =40.05, c = 25.75, \sigma = 30.9\) for 3D and contour plots of Eq. (25).

Take \(\alpha _{1} = 15.5,\alpha _{2} = 20.25, \alpha _{3} =20.05, c = 40.75, \sigma = 20.9\) for 3D and contour plots of Eq. (26).

Take \(\alpha _{1} = 1.7, \alpha _{3} =1.5, c = 0.15, \sigma = -0.009\) for 3D and contour plots of Eq. (27).

Take \(\alpha _{1} = 2.7, \alpha _{3} =2.5, c = 15.15, \sigma = -8.007\) for 3D and contour plots of Eq. (28).

Take \(\alpha _{1} = 1.007, \alpha _{3} =1.005, c = 0.0015, \sigma = 0.007\) for 3D and contour plots of Eq. (29).

Take \(\alpha _{1} = 0.05, \alpha _{2}= =0.025, \alpha _{3}= 0.005, c = 3.75, \sigma = 0.009\) for 3D and contour plots of Eq. (30).

Take \(\alpha _{1} =-0.03, \alpha _{2}= =2.076, \alpha _{3}= 5.085, \sigma = -0.0109\) for 3D and contour plots of Eq. (31).

Take \(\alpha _{1} =1.107, \alpha _{2}= =15.7, \alpha _{3}= 4.5, \sigma = -18.007\) for 3D and contour plots of Eq. (32).

Take \(\alpha _{1} =0.007, \alpha _{2}= =10.5, \alpha _{3}= -10.5, \sigma = 1.7\) for 3D and contour plots of Eq.(33).

Take \(\alpha _{1} =3.7, \alpha _{2}= =5.5, \alpha _{3}= -2.5, \sigma = -0.007\) for 3D and contour plots of Eq. (35).

Take \(\alpha _{1} =-11.7, \alpha _{2}= =0.5, \alpha _{3}= 0.5, \sigma = -2.7\) for 3D and contour plots of Eq. (36).

Take \(\alpha _{1} =-1.7, \alpha _{2}= =8.5, \alpha _{3}= 2.5, \sigma = 0.007\) for 3D and contour plots of Eq. (37).

Take \(\alpha _{1} =-20.7, \alpha _{2}= =10.5, \alpha _{3}= 13.5, \sigma = 2.7\) for 3D and contour plots of Eq. (38).

Take \(\alpha _{1} =0.7, \alpha _{2}= =0.2, \alpha _{3}= 1.5, \alpha _{4}= 0.5, \sigma = -0.007\) for 3D and contour plots of Eq. (40).

Take \(\alpha _{1} =0.07, \alpha _{2}= =0.22, \alpha _{3}= 1.52, \alpha _{4}= 0.5, \sigma = -0.7\) for 3D and contour plots of Eq. (41).

Take \(\alpha _{1} =10.07, \alpha _{2}= =12.22, \alpha _{3}= 14.52, \alpha _{4}= 20.5, \sigma = 0.07\) for 3D and contour plots of Eq. (43).
Discussion and conclusion
In order to visualize the physical behavior of the solutions and explain the shape of solitary waves, this part displays the solutions derived using 3D and contour graphs. The wave height is shown in 3D graphs as a function of horizontal location, vertical position, and time, allowing us to view the wave propagation in three dimensions.We can learn more about the shape, amplitude, speed, and direction of solitary waves by viewing these plots.
Contrarily, contour plots show how wave height varies spatially as a function of horizontal and vertical coordinates, with curves indicating regions of constant height. These plots offer a thorough and quantitative depiction of the wave behavior and properties throughout time, enabling us to examine its shape, amplitude, and speed. Overall,3D and contour plots are useful tools for research and understanding of solitary wave solutions.
The Figs. 1, 6, 10, 13 and 17 display dark solitary wave solutions while Figs. 2, 7, 11, 14 and 18 display singular dark solitary wave solutions. Similarly the Figs. 3, 4, 8, 9, 12, 15, 16 and 19 display periodic solitary wave solutions. Furthermore the Fig. 5 display rational solitary wave solutions.
This research article introduced the modified extended direct algebraic method as a powerful tool for discovering new types of solitary wave solutions for the nonlinear Murray equation in mathematical biology. The study demonstrated that this method consistently produces exact and stable solutions across a wide range of parameters. These newly identified solitary wave solutions have significant implications for simulating various biological systems, such as blood flow and tumor growth. Moreover, they contribute to the refinement of mathematical models in the field of mathematical biology. Future research avenues may explore the dynamical and physical characteristics of these recently discovered solitary wave solutions and investigate their potential applications in diverse branches of engineering and science. In conclusion, this study provides valuable insights into the behavior of solitary waves within biological systems, paving the way for further exploration and practical applications in this promising field.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Al-Rawi, E. S. & Qasem, A. F. Numerical solution for nonlinear Murray equation using the operational matrices of the Haar wavelets method. Tikrit J. Pure Sci. 15(2), 288–294 (2010).
Cherniha, R. M. New ansätze and exact solutions for nonlinear reaction-diffusion equations arising in mathematical biology. Symm. Nonlinear Math. Phys. 1, 138–146 (1997).
Murray, J.D. Lectures on nonlinear-differential-equation models in biology. (1977).
West, G. B., Brown, J. H. & Enquist, B. J. A general model for the origin of allometric scaling laws in biology. Science 276(5309), 122–126 (1997).
Olufsen, M. S. et al. Numerical simulation and experimental validation of blood flow in arteries with structured-tree outflow conditions. Ann. Biomed. Eng. 28, 1281–1299 (2000).
Zhang, J., Chen, L. & Liu, Y. Computational study of the impact of physical parameters on the structure and function of blood vessel networks. Biomech. Model. Mechanobiol. 18(6), 1799–1817 (2019).
Behr, M., Arora, D., Coronado, O. M. & Pasquali, M. Models and finite element techniques for blood flow simulation. Int. J. Comput. Fluid Dyn. 20(3–4), 175–181 (2006).
Revellin, R., Rousset, F., Baud, D. & Bonjour, J. Extension of Murray law using a non-Newtonian model of blood flow. Theor. Biol. Med. Model. 6(1), 1–9 (2009).
Islam, W. & Younis, M. Weakly nonlocal single and combined solitons in nonlinear optics with cubic quintic nonlinearities. J. Nanoelectron. Optoelectron. 12(9), 1008–1012 (2017).
Younis, M. et al. Analytical optical soliton solutions of the Schrödinger-Poisson dynamical system. Results Phys. 27, 104369 (2021).
Hubert, M. B. et al. Optical solitons with Lakshmanan-Porsezian-Daniel model by modified extended direct algebraic method. Optik 162, 228–236 (2018).
Soliman, A. A. The modified extended direct algebraic method for solving nonlinear partial differential equations. Int. J. Nonlinear Sci. 6(2), 136–144 (2008).
Soliman, A. A., & Abdo, H. A. (2012). New exact Solutions of nonlinear variants of the RLW, the PHI-four and Boussinesq equations based on modified extended direct algebraic method. arXiv preprint arXiv:1207.5127.
Hubert, M. B. et al. Optical solitons with modified extended direct algebraic method for quadratic-cubic nonlinearity. Optik 162, 161–171 (2018).
Hubert, M. B. et al. Optical solitons in parabolic law medium with weak non-local nonlinearity using modified extended direct algebraic method. Optik 161, 180–186 (2018).
Samir, I., Badra, N., Ahmed, H. M. & Arnous, A. H. Solitons dynamics in optical metamaterial with quadratic-cubic nonlinearity using modified extended direct algebraic method. Optik 243, 166851 (2021).
Ali, A. H. A. The modified extended tanh-function method for solving coupled MKdV and coupled Hirota-Satsuma coupled KdV equations. Phys. Lett. A 363(5–6), 420–425 (2007).
Abdou, M. A. & Soliman, A. A. Modified extended tanh-function method and its application on nonlinear physical equations. Phys. Lett. A 353(6), 487–492 (2006).
Zhuo-Sheng, L. & Hong-Qing, Z. On a new modified extended tanh-function method. Commun. Theor. Phys. 39(4), 405 (2003).
Elwakil, S. A., El-Labany, S. K., Zahran, M. A. & Sabry, R. Modified extended tanh-function method and its applications to nonlinear equations. Appl. Math. Comput. 161(2), 403–412 (2005).
Soliman, A. The modified extended tanh-function method for solving Burgers-type equations. Phys. A Stat. Mech. Appl. 361(2), 394–404 (2006).
Eldidamony, H. A., Ahmed, H. M., Zaghrout, A. S., Ali, Y. S. & Arnous, A. H. Highly dispersive optical solitons and other solutions in birefringent fibers by using improved modified extended tanh-function method. Optik 256, 168722 (2022).
Sekulić, D. L., Satarić, M. V. & Živanov, M. B. Symbolic computation of some new nonlinear partial differential equations of nanobiosciences using modified extended tanh-function method. Appl. Math. Comput. 218(7), 3499–3506 (2011).
Islam, M. T., Akter, M. A., Ryehan, S., Gomez-Aguilar, J. F., & Akbar, M. A. (2022). A variety of solitons on the oceans exposed by the Kadomtsev Petviashvili-modified equal width equation adopting different techniques. J. Ocean Eng. Sci.
Islam, M. T., Akter, M. A., Gomez-Aguilar, J. F., Akbar, M. A. & Perez-Careta, E. Innovative and diverse soliton solutions of the dual core optical fiber nonlinear models via two competent techniques. J. Nonlinear Opt. Phys. Mater. 32, 2350037 (2023).
Funding
Open access funding provided by University of Debrecen.
Author information
Authors and Affiliations
Contributions
Conceptualization; MI, SH, MSI. Writing—original draft preparation; SH, RA, MA. Methodology; MI, SH, MSI. Software and Visualization; AHA. Formal analysis and investigation; RA, MAT, MA. Writing—review and editing: MI, AHA, MAT. Resources; MSI, MAT. Supervision: MI.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Inc, M., Hussain, S., Ali, A.H. et al. Analyzing solitary wave solutions of the nonlinear Murray equation for blood flow in vessels with non-uniform wall properties. Sci Rep 14, 10588 (2024). https://doi.org/10.1038/s41598-024-61276-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-61276-z
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
